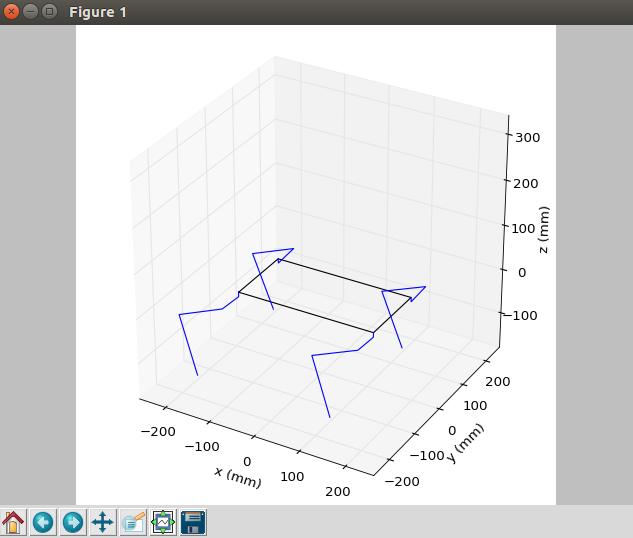
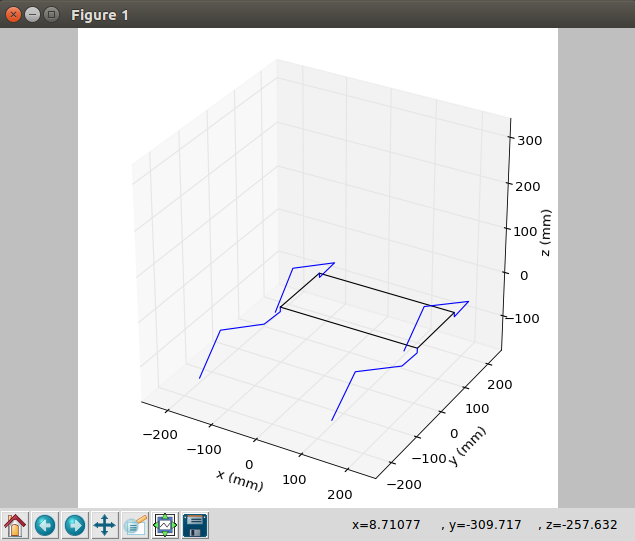
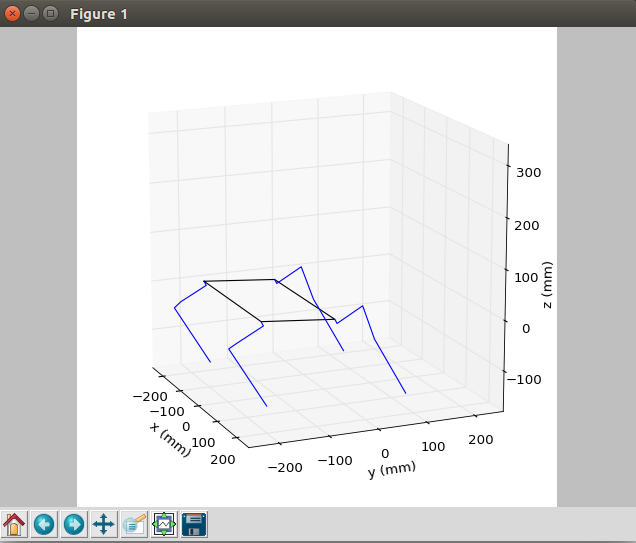
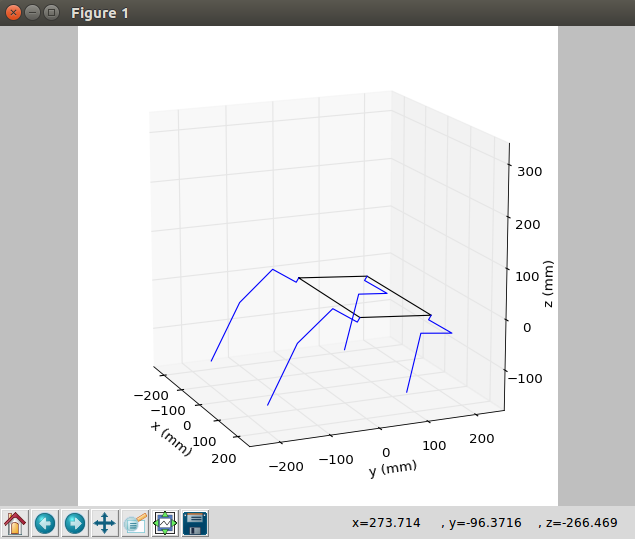
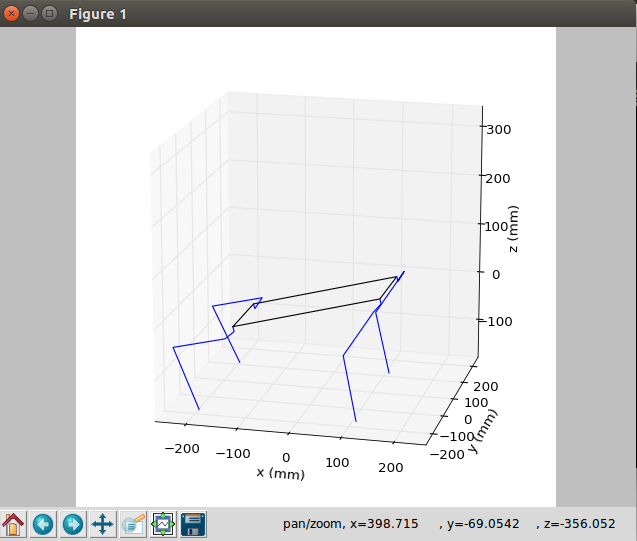
The past two weeks hold many updates. To begin with I begin working with a simulation based on the inverse kinematics (ik) engine from adham-elarabawy who created all elements of this particular simulation but encountered problems initially running it. I traced it bake to f'print statements in the ik engine code. These are print statements in python 3, which is the version I am using. I found that if I commented them out, the code would run and allow me to access the simulation. The simulation allows the user to adjust the role, pitch, yaw, and basic position. about the origin the the leg angles moving to meet the specification needs necessary.